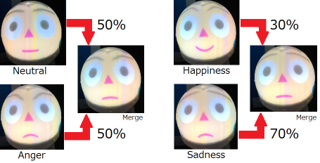
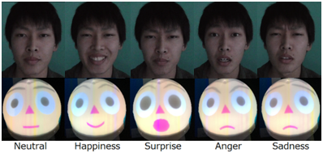
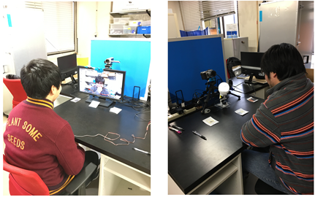
In this research, we developed a telepresence robot with synchronized operation and investigated the usefulness of synchronized operation by telepresence robot. We conducted interpersonal dialogue assuming remote communication actually using the developed robot and evaluated robot’s confronting robot face to face with robot in case there was merging of emotions and synchronized behavior by robot, We investigated the difference in evaluation to quality.



- Soji Yonezu and Hirotaka Osawa. 2017. Telepresence Robot with Merging Users’ Emotions and Behaviors. In IEEE International Symposium on Robot and Human Interactive Communication, 213–218.
本研究では、同調動作を実装したテレプレゼンスロボットを開発し、テレプレゼンスロボットによる同調動作の有用性を調査した。開発したロボットを用いて実際に遠隔コミュニケーションを想定した対人対話を行い、ロボットによる同調動作、感情のマージがあった場合となかった場合での、ロボットと対面した被験者のロボットへの評価、会話の質への評価の違いについて調査した。
- Soji Yonezu and Hirotaka Osawa. 2017. Telepresence Robot with Merging Users’ Emotions and Behaviors. In IEEE International Symposium on Robot and Human Interactive Communication, 213–218.